





Primera generación :
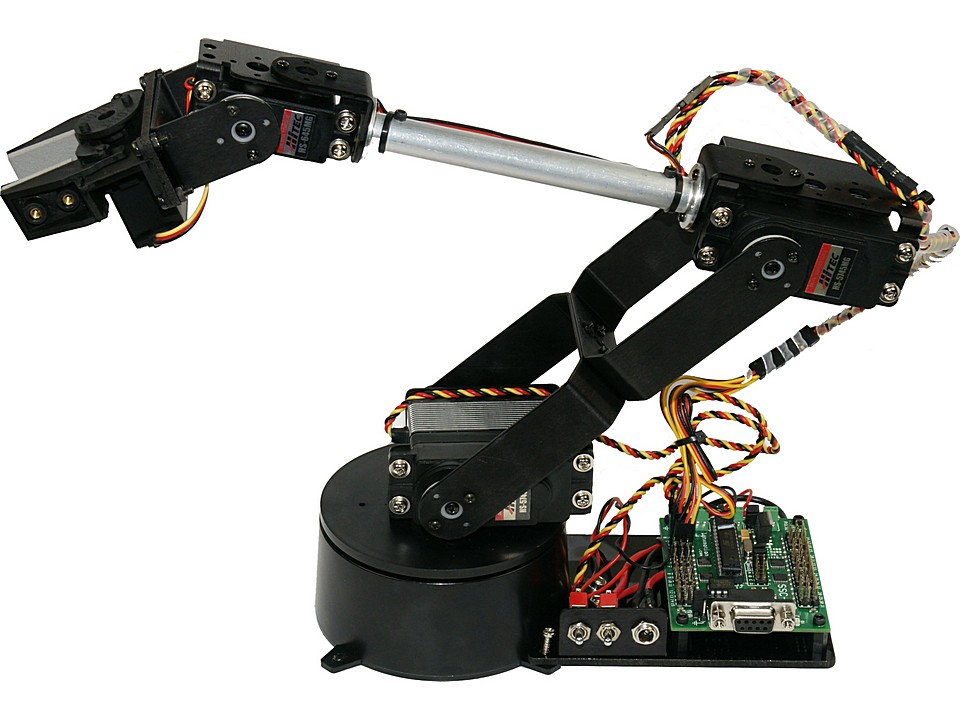
Son los llamados robots manipuladores y se desarrollan en los años 50. Estos robots consisten en una secuencia de cuerpos rígidos conectados mediante articulaciones prismáticas o de revolución. Para que sea más fácil imaginaroslo, se podría decir que son come brazos humanos. Son usados principalmente en la industria para mover materias, piezas, herramientas, o dispositivos especiales y puede ser dirigido directamente por un operador humano.

En la industria se reparten en cuatra categorías :
– Clase A : Telemanipuladores
– Clase B : Manipuladores prereglados
– Clase C : Robots programables
– Clase D : Robots de aprendizaje (estos ya pertenecen a la segunda generación que veremos más adelante)
Segunda generación :
En esta categoría encontraremos los robots de aprendizaje. Estos aparecen en los años 80. Son los más conocidos en el mundo industrial.
Los robots de aprendizaje son robots manipuladores que pueden repetir una secuencia de movimientos programada previamente por un operador humano. Es decir, el humano le “enseña” una serie de movimientos que el robot aprende y memoriza para poder realizar una tarea industrial.
Otra nueva funcionalidad de estos robots es que pueden interaccionar con su entorno mediante sensores. Por ejemplo, supongamos que el robot ha memorizado una secuencia para ir a buscar una pieza sobre una mesa. Si éste se encuentra con un obstaculo en medio, en vez de chocar contra él (y probablemente estropearse), gracias al sensor, el robot se parará y enviará una alerta al operario supervisor. El uso de los sensores sigue siendo muy limitado.
Tercera generación :
Son los robots con control sensorizado. Se desarollan entre los años 80 y 90.
La novedad es que ahora los robots tienen un controlador, es un ordenador que usando las informaciones de los sensores ejecuta las órdenes de un programa y las envía al manipulador para que realice los movimientos necesarios.
Estos robots tienen consciencia de su entorno y puede interactuar con éste. Según el entorno en el que se encuentre el robot decidirá cúal es el camino óptimo para cumplir su tarea. En esta época aparece también la visión artificial, lo que permitirá a los robots analizar más fácilmente su entorno.

Cuarta generación :
Son los robots inteligentes, similares a los robots con control sensorizado pero gracias a los sensores pueden enviar información del estado del proceso. Esto permite una toma inteligente de decisiones y el control del proceso en tiempo real para que los robots tengan movilidad avanzada en exteriores e interiores. Estos aparecen a finales de los años 90.

Quinta generación :
Se puede decir que hoy en día estamos viendo la quinta generación de robots. Son los robots que usan inteligencia artificial. La mayoría de laboratorios de robótica investigan en este campo.
Entre ellos esta el famoso robot Watson de IBM, del cúal hablamos en este artículo : Watson.
No hay comentarios:
Publicar un comentario